Enquanto ainda na universidade pude acompanhar de perto o trabalho de conclusão de curso de meu grande amigo Bruno Callegaro. Em seu trabalho, cuja monografia está disponível aqui, ele desenvolveu um controlador para um veículo aéreo quadrírotor baseado na placa de desenvolvimento STM32F4-Discovery, que possui como processador base o STM32F407VG fabricado pela STMicroeletronics.
Toda a montagem de hardware e desenvolvimento de software por ele feito com muita empolgação ao longo de meses me trouxeram o desejo de um dia montar uma máquina semelhante, mas anos se passaram até que desse início a concretização deste desejo.
Finalmente ao me deparar com um anúncio no mercado livre de um frame usado e já com uma placa controladora, por pouco mais de 200 reais, vi a oportunidade de me forçar a iniciar a montagem de uma máquina de voo semelhante aquela que vi ser construída. Atente ao fato que nesta montagem tentei economizar o máximo, comprando componentes muitas vezes de marcas pouco conhecidas.
Neste primeiro post listo os componentes que utilizarei na montagem, e nos próximos irei documentar o processo de montagem desta máquina voadora.
Principais componentes:
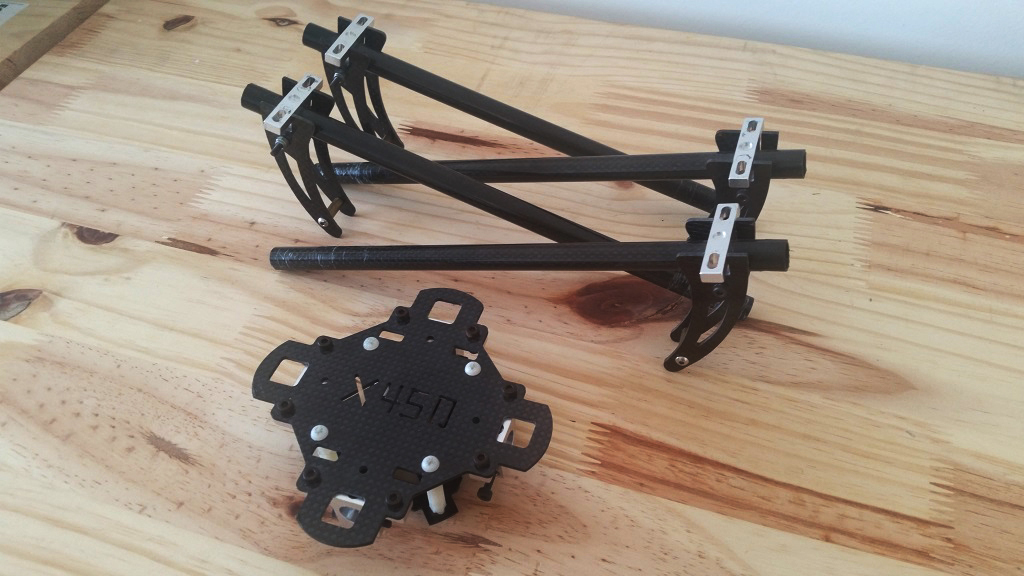
Frame: X450 (Genérico)
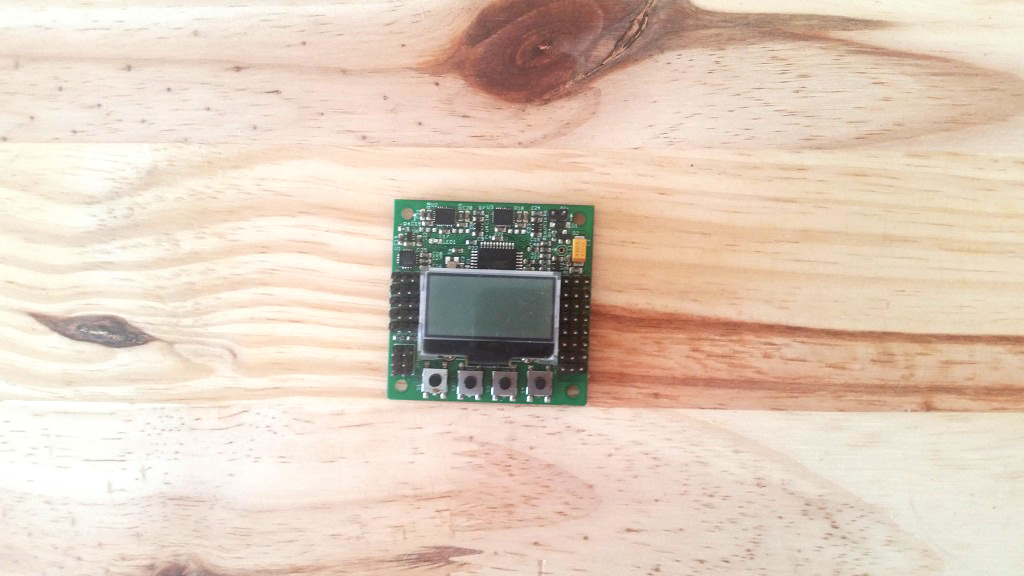
Controladora: Hobbyking KK2.0 (Inicialmente)
Bateria: ZOP POWER 11.1V 3300MAH 3S 35C Lipo Battery
Rádio transmissor: Flysky FS-i6S 2.4G 10 Canais
Rádio receptor: FS-iA6B 6 Canais
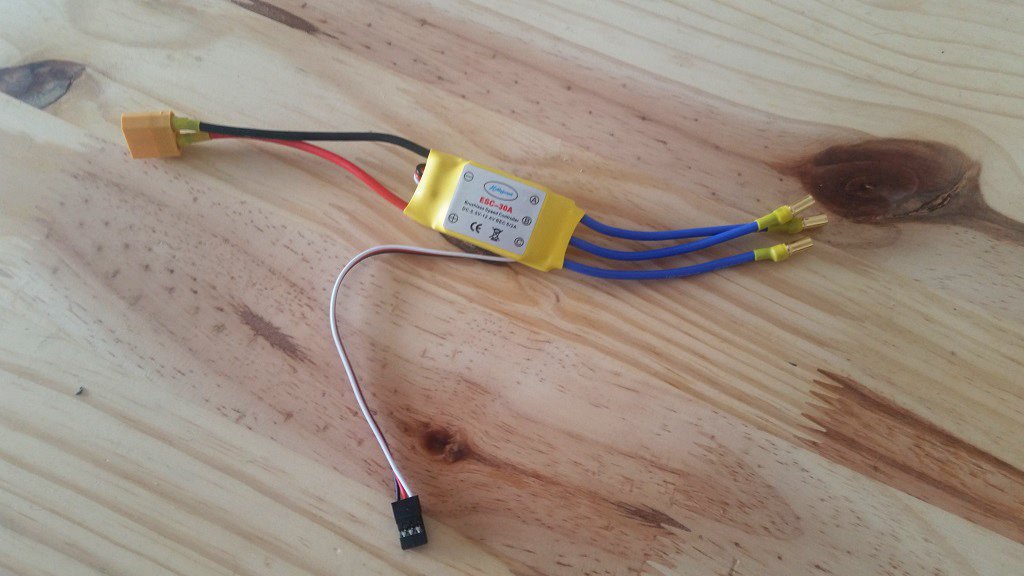
ESC: Hobbypower ESC-30A
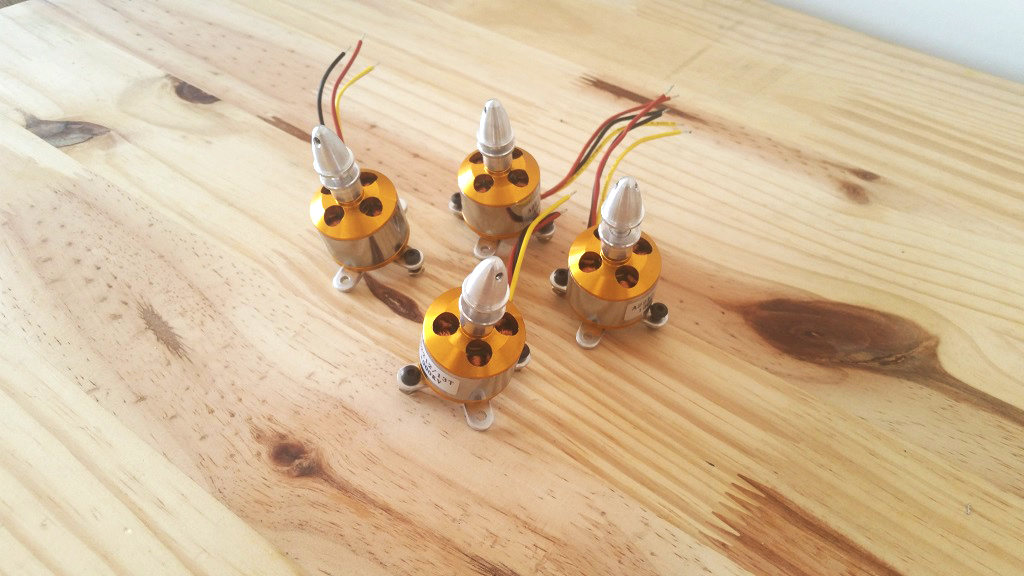
Motor: A2212 1000KV
2 curtidas
Iniciei a montagem. Abaixo vou listar novamente os componentes, mas agora com fotos.
Frame X450
4 x Motores A2212 1000KV
4 x ESC Hobbypower ESC-30A
Hobbyking KK2.0
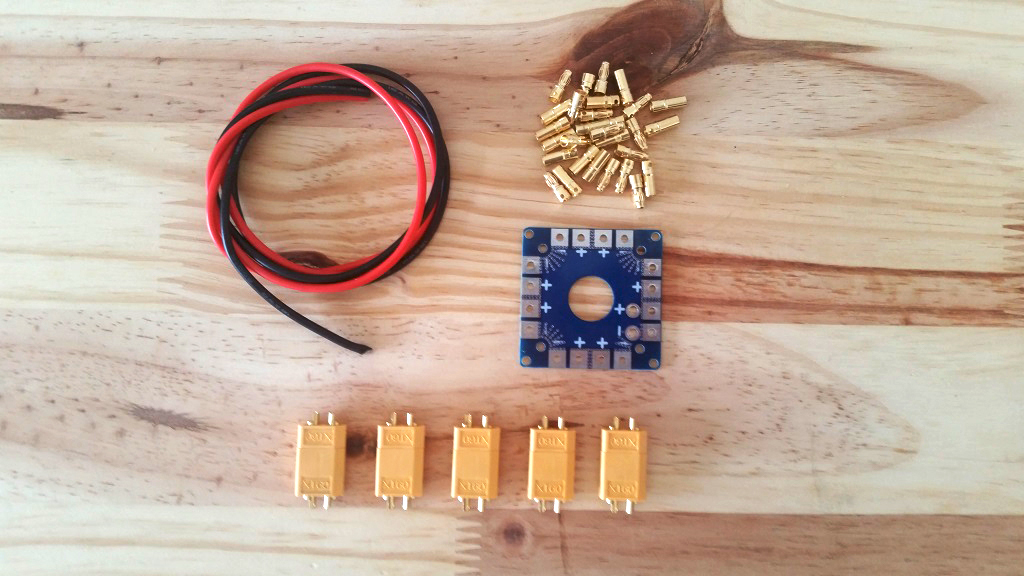
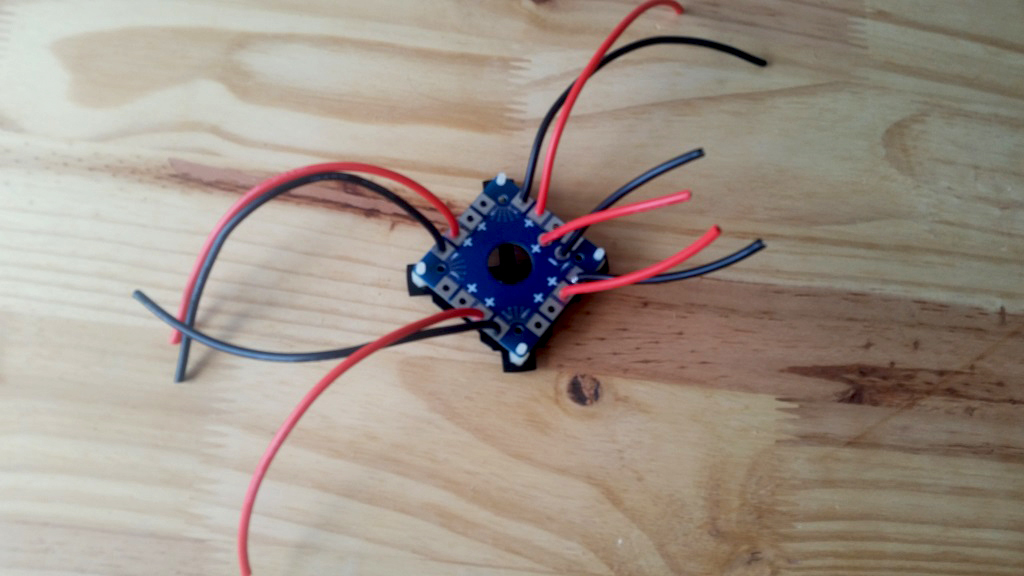
Placa de distribuição de energia + Conectores XT60 + Conectores banana + Fios silicone 14AWG
Comecei com a fixação da kk2.0 no suporte central superior do frame, depois soldei os cabos na placa de distribuição para a fixação dela no suporte central inferior. A montagem dos motores no frame foram feitas antes da solda dos conectores banana neles, já que o processo de soldagem assim não fica tão comprometido.
Usei o conector XT60 fêmea para conexão da bateria na placa de distribuição, já que as baterias com este conector convencionalmente usam o dual, e conectores XT60 macho para conexão de energia dos ESC na placa de distribuição, embora não faça diferença e pudesse utilizar os mesmos, mas com a finalidade de maior organização coloquei os conectores fêmea, além de ter a possibilidade de conectar a bateria direto no ESC caso seja necessário. Na montagem dos ESC foram soldados conectores banana para conexão com os terminais dos motores, além do XT60 para alimentação. Termocontráteis foram usados para isolamento elétrico e acabamento nas conexões,
Os próximos passos consistem na finalização da solda dos conectores (demais ESC e placa de distribuição), montagem dos cabos de sinal entre receptor de rádio e controladora kk2.0, além da fixação da bateria e ESCs no frame.
1 curtida
Eu nunca tinha lido nada sobre esse tema, então a primeira coisa que me chamou a atenção foi esse tal de ESC… Dei uma procurada e descobri que ESC significa Electronic Speed Control e que é um dispositivo programável para controle de velocidade de motores. Tem um artigo interessante (em inglês) aqui:
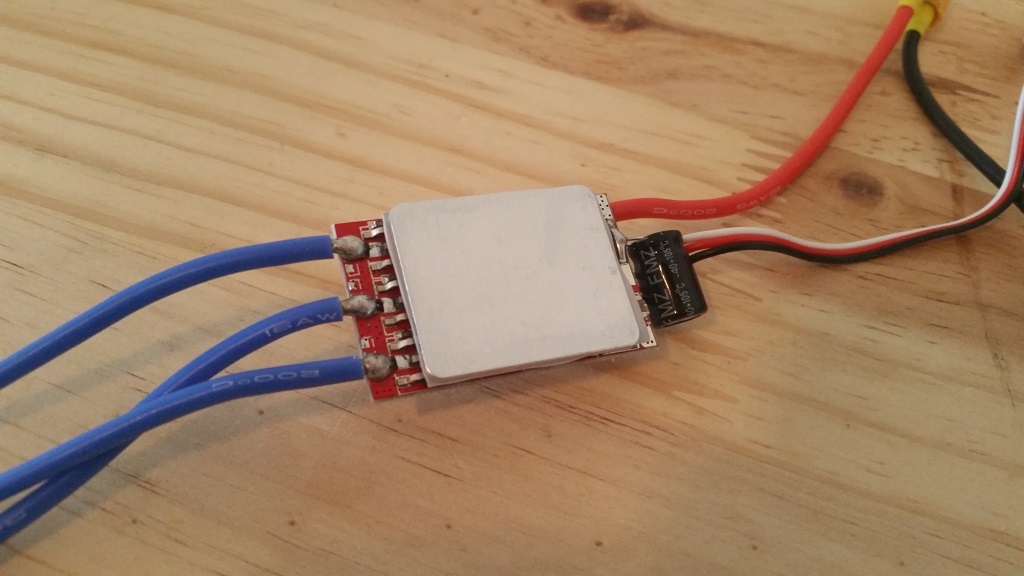
Sobre o ESC, um dos quatro que comprei não estava funcionando, então antes de abri-lo testei a continuidade entre as vias de terra do sinal de alimentação e do sinal de controle e para minha surpresa não estavam conectados, então ao puxar com um pouco mais de força pude averiguar que o cabo de alimentação estava solto, por conta de uma solda mal feita.
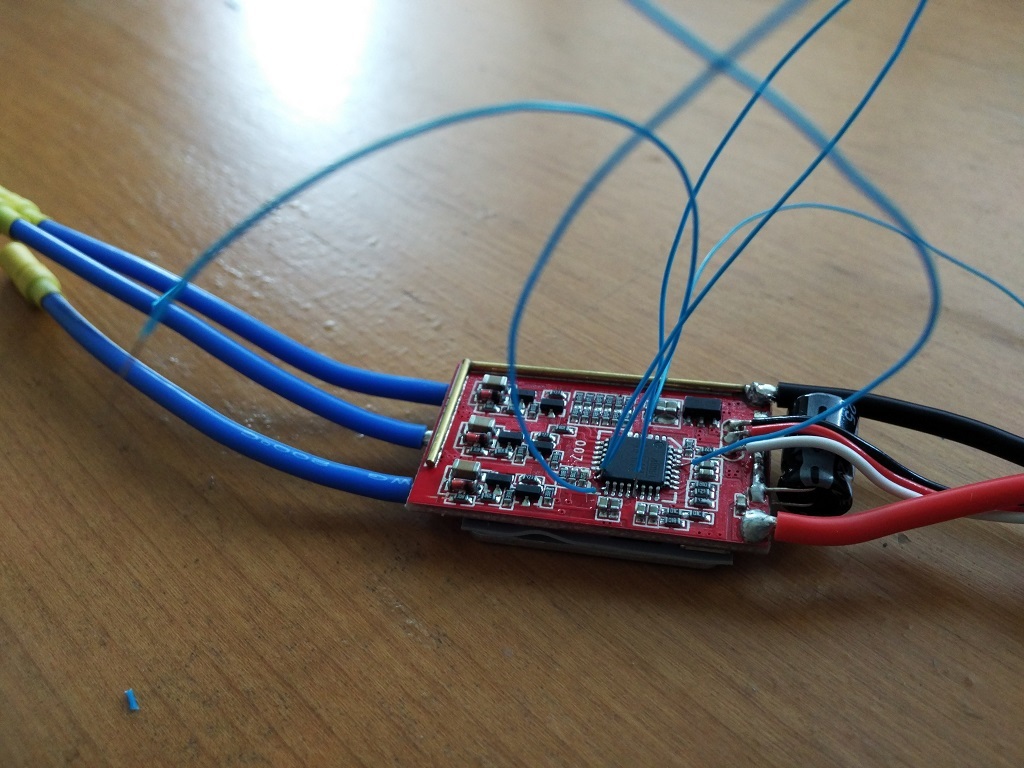
Tirei o termocontrátil que protege o ESC para então fazer o reparo na solda. Como pode ser visto na foto, em uma das faces da placa estão os mosfets responsáveis pelo acionamento do motor brushless, e na outra o circuito para controle dos mosfets, sendo o principal componente um microcontrolador AVR da Atmel.
Os mosfets estão encobertos por um dissipador responsável por manter a temperatura em níveis seguros.
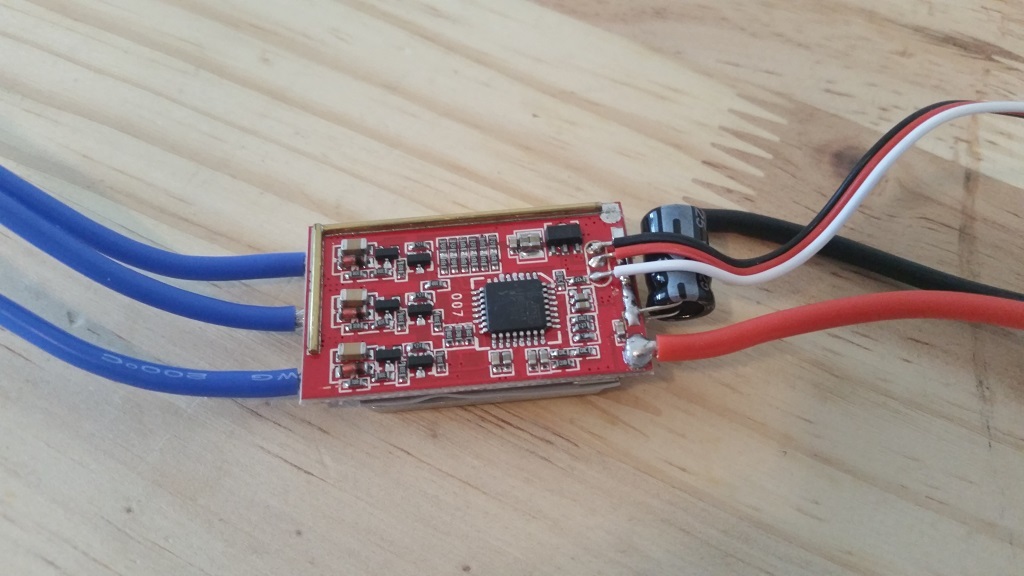
Na outra face pode ser visto o microcontrolador ATmega8, responsável por receber os comandos direto do receptor do rádio, ou da controladora no caso de multirotores e alguns outros modelos.
Existe um firmware aberto bastante conhecido, desenvolvido por Simon Kirby, cujo repositório pode ser acessado neste link. Curiosamente muitos ESC comercioalizados na china contem o firmware escrito pelo SimonK, por apresentar um excelente desempenho, mas não é o caso dos que comprei, então uma das minhas próximas tarefas é fazer a atualização de firmware e documentar aqui o processo. Infelizmente na placa deste ESC não existe uma interface para programação do microcontrolador de forma simples, muito provavelmente por falta de espaço na placa e talvez na tentativa de restringir o usuário de fazer esse tipo de modificação, então terei que soldar alguns fios para programação ISP. Existe um cabo (link aqui) que facilita essa operação, mas o custo e tempo de entrega acabam sendo impeditivos para mim, mas trás a mente que uma alternativa seria a impressão 3D de uma peça com contatos e fazer um cabo artesanal semelhante a este.
1 curtida
Realizei a troca de firmware dos ESC utilizando um programador AVR baseado no USBTiny, utilizando o software KKMulticopter Flashtool, embora fosse possível fazer compilação e programação utilizando alguma ferramenta a exemplo do AVRDUDE.
Como dito anteriormente a placa do ESC não possui pontos na placa para programação, então tive de soldar alguns fios nos pinos de programação do microcontrolador ATmega8 e com uma matriz de contatos fiz a conexão com os pinos correspondentes do programador.
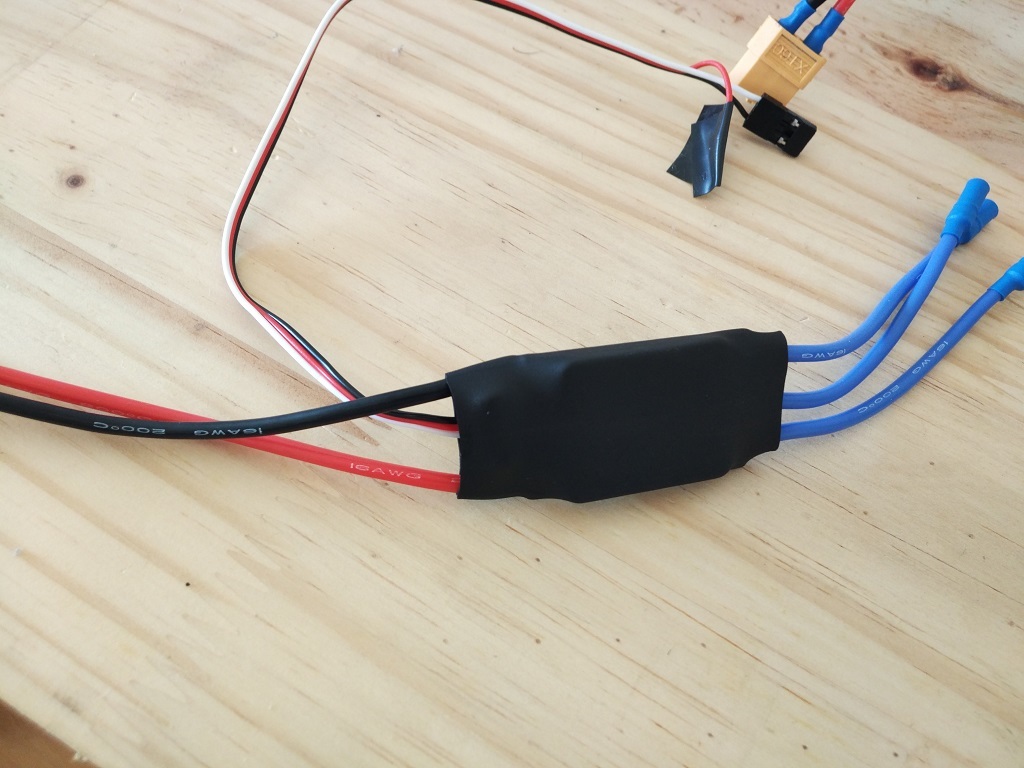
Após a atualização e teste fiz o isolamento da placa com um termocontrátil, assim como vem de fábrica, apenas alterando a cor e utilizando termocontrátil preto.
Gravei um video demonstrando a operação dos ESC com firmware stock e com o firmware do SimonK. É bastante perceptível a diferença inclusive no ruído sonoro produzido pela movimentação do motor.
Depois da instalação do firmware você removeu os fios que você tinha soldado no ATmega8 ou os preservou para futuras atualizações?
Removi por motivos de segurança. A vibração durante o voo é muito grande, o que poderia ocasionar em algum curto circuito na placa. Estou com vontade de montar um cabo com algum tipo de pogo pin que facilite o trabalho de programação.
Talvez uma boa solução seja aplicar um pouco de cola quente sobre o ATmega8 para garantir que a vibração não vai causar curtos ou soltar os pontos de solda. E aí você pode instalar um pequeno conector feito com uma barra de pinos e também colado junto ao corpo do ESC.
1 curtida
Esta é uma boa opção Juca, é provável que faça algo em breve para fazer ensaios mais específicos nos motores.
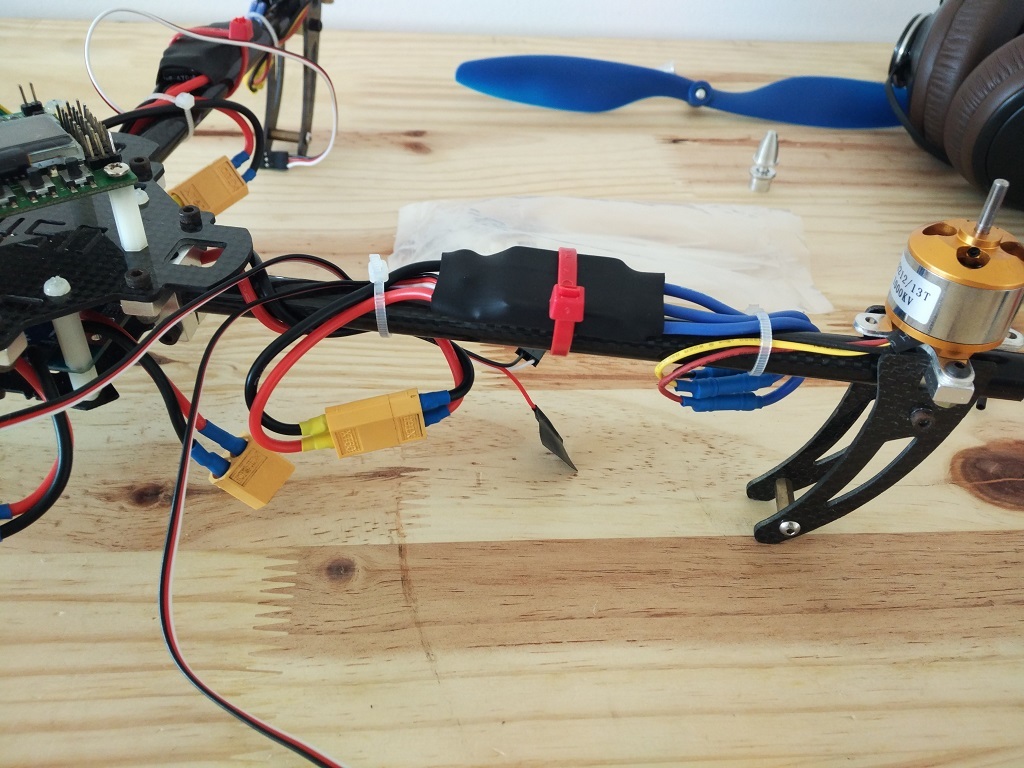
Conclui uma primeira montagem do quadricoptero após a troca do firmware de todos ESCs. A fixação deles e organização dos cabos foi feita com abraçadeiras de nylon.
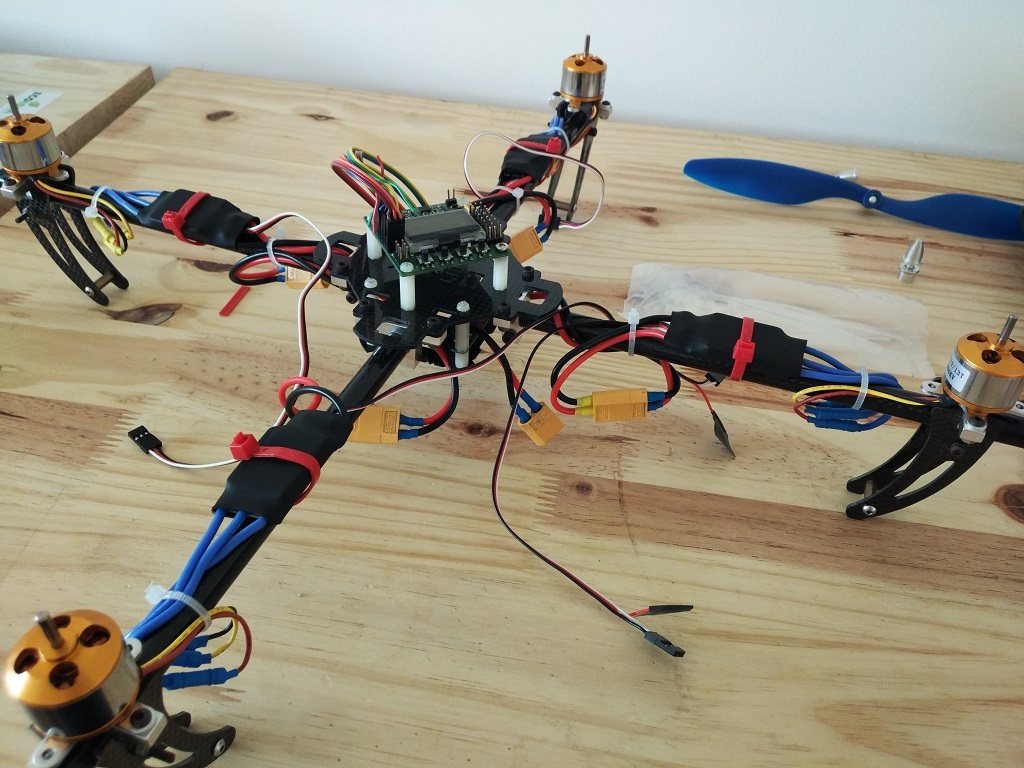
Nesta imagem é possível ver a forma e montagem das hélices. A montagem é feita intercalando-se uma hélice em sentido horário com uma de sentido anti-horário, acompanhando o sentido de rotação do motor, que é dependente do esquema de ligação no ESC. Para alteração do sentido basta que se faça a inversão de dois dos três cabos de ligação entre o motor brushless e ESC, e o sentido empregado deve estar de acordo com o configurado na controladora, para que o acionamento dos motores seja feito corretamente.
Ainda sem fixar a bateria no frame liguei o quadricoptero para um primeiro teste com todos as ligações.
1 curtida